Transportfahrzeug
Statt von klobigen Lieferwagen werden Paketlieferungen im efeuQuartier von kleinen, autonom fahrenden Robotern gebracht. Diese Fahrzeuge sind sicher und umweltfreundlich und machen immer höflich Platz.

Was kann das Transportfahrzeug?
- Fährt nur auf Gehwegen – und maximal in Schrittgeschwindigkeit
- Kann Stufen von bis zu 12cm überwinden
- Funktioniert auch bei -20° und +40°
- Kann sich mit einer Hupe und einem LED-Lichtband bemerkbar machen
- Weicht Entgegenkommenden aus oder lässt sie vorbei
Die Technischen Daten auf einem Blick
| Maß | Einheit |
| Höhe | 0,6 m – 1,1 m |
| Breite | 0,6 m |
| Länge | 0,95 m |
| Max. Geschwindigkeit | 1,6 m/s |
| Max. Paketmaße | 0,45 x 0,6 x 0,45 m |
| Max. Transportlast | 100 kg |
Fahrzeugkonzept und Fahrzeugaufbau
Der funktionale Aufbau des efeu Transportfahrzeugs wird gegliedert in die Bereiche Energieversorgung, Bauraum, Antrieb, Personensicherheit, Chassis und Securitykonzept, Schnittstelle Übergabebock und Lasthandling.
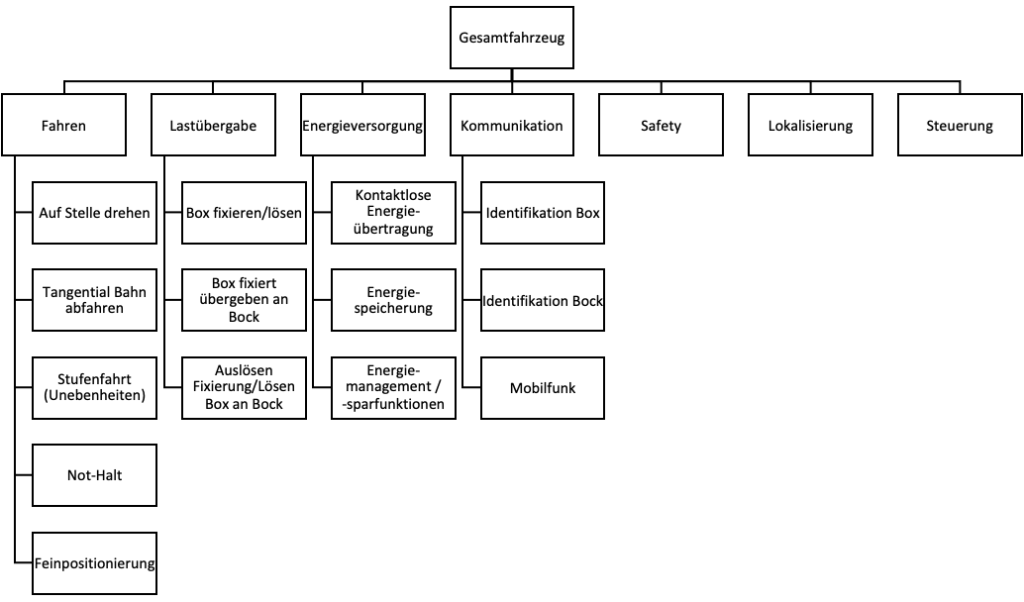
Das Fahren
Das Fahren wird mit vier einzeln angetriebenen Rädern realisiert, dabei ist die Vorwärts- als auch die Rückwärtsfahrt uneingeschränkt möglich. Die Luftreifen haben die Eigenschaft, Unebenheiten im Gelände gut auszugleichen und aufgrund der großen Raddurchmesser ist auch eine Stufenfahrt oder das überwinden kleiner Hindernisse kein Problem. Die Lenkbewegung des Fahrzeuges wird lediglich durch unterschiedliche Geschwindigkeiten der einzelnen Räder realisiert. Das bedeutet, dass durch die Ansteuerung der einzelnen Radantriebe die gewünschte Lenkbewegung der Knickachse ohne zusätzlichen Lenkantrieb umgesetzt wird. Durch die konstruktive Umsetzung als Knicklenker sind kleine Kurvenradien von minimal 850 mm möglich, was Wendemanöver mit geringem Platzbedarf ermöglicht.
Die Lastübergabe
Für die Aufnahme und Übergabe der Transportboxen ist eine Hub-Einheit am Fahrzeug vorgesehen. Wenn das Fahrzeug an seiner Zieladresse angekommen ist, können die Transportboxen vom Fahrzeug über eine entsprechende Hubbewegung in das Übergabedock eingehängt und verriegelt bzw. ausgehängt und entriegelt werden. Während der Fahrt werden die Transportboxen auf dem Fahrzeug verriegelt, wodurch diese gegen Diebstahl und ungewollten Verlust geschützt sind.


Die Energieversorgung
Für die Energiespeicherung kommen LTO (Lithium-Titanat-Oxid) Akkus mit einer hohen Kapazität, einer hohen Zyklenfestigkeit und Schnellladefähigkeit zum Einsatz. Die Energieübertragung erfolgt kontaktlos über einen Übertragerkopf an der Unterseite des Fahrzeuges. Die Zwischenkreisspanunng beträgt 48 V. Diese Schutzkleinspannung bietet Schutz gegen elektrische Schläge und ermöglicht eine einfache sowie sichere Wartung des Systems.
Die Fahrzeugkommunikation
Für die Kommunikation zwischen den Fahrzeugen und der Leitsteuerung wird der neue Kommunikationsstandard 5G eingesetzt. Innerhalb des Fahrzeuges findet die Kommunikation über Ethernet und EtherCAT statt. Für die Interaktion mit Passanten zeigt das Fahrzeug über das LED-Band bspw. Richtungsänderungen sowie den Status des Fahrzeuges an. Für eine eindeutige Identifikation der Transportboxen werden verschlüsselte RFID-Tags verwendet, welche vom Fahrzeug ausgewertet werden.
Safety
Im Bereich Safety geht es um die Eigensicherheit des Fahrzeugs. Mithilfe einer Sicherheitssteuerung und zahlreichen Sicherungssensoren, soll die Fahrzeugsicherheit garantiert werden.
Steuerung
Die Steuerungstechnik sowie die entsprechende Fahrzeugsoftware für die Umsetzung der Fahrbefehle und Aktionen in Steuerbefehle für die Aktoren wird von SEW-EURODRIVE entwickelt. Die notwendigen Fahrbefehle sowie die Verarbeitung der entsprechenden Sensordaten findet auf einem separatem Navigationsrechner statt, die zugehörige Software für die Navigation entwickelt das KIT -Institut für Fördertechnik und Logistik (kurz: IFL).
Lokalisierung
Die Lokalisierung fasst die Positions- und Orientierungsschätzung des Fahrzeuges in seiner Umgebung zusammen. Mit Hilfe der Laserscanner und Kameras findet eine Umfeldwahrnehmung statt. Zusätzlich werden Beschleunigungssensoren und GPS-Daten für eine Verbesserung der Positionsschätzung eingesetzt.