Kartierungsverfahren
Übersicht: Kartierungsverfahren
Für das Forschungsprojekt efeuCampus sind vorerst drei bzw. vier Kartierungsverfahren interessant:
- Bildpunkt/ Linien- Feature
- Spärliche 3D- Punkte
- Dichte 3D- Punkte
Bildpunkt/ Linien Feature
Auf unterschiedlichen Bildern sollen immer identische Landmarken am abgebildeten Objekt ausgewählt werden. Da die Schätzung der Landmarken für jeden Pixel sehr aufwändig ist, werden aus Bildern nur charakteristische Features extrahiert, welche für eine eindeutige Beschreibung eines Objekts verwendet werden können. Diese Features sind meist Ecken oder Kanten, welche über mehrere Bilder hinweg leicht zu erkennen sind (Gräter, 2019).
Spärliche 3D- Punkte
Neben Feature- basierten Methoden stehen sogenannte direkte Methoden zur Verfügung, um identische Punkte aus dem Bild zu extrahieren. In diesem Fall enthält das Feature nur den Punkt, keinen Deskriptor mehr. Nicht für jeden Pixel kann ein 3D- Punkt berechnet werden und somit besteht die Karte lediglich aus wenigen 3D- Punkten, Deshalb wird diese Methode auch spärlich genannt. Die Wiedererkennung eines gleichen Punktes erfolgt dann nicht mittels Deskriptoren, sondern direkt über die Ähnlichkeit der unmittelbaren Umgebung zweier zu verknüpfender Punkte. Diese Methode wird gewöhnlich als Photometric Error bezeichnet (Engel, Usenko, & Cremers, 2016).
Der Photometric Error beschreibt den Messwertunterschied für die Helligkeit eines gleichen Punktes. Eine Kamera misst die Lichtstärke eines Punktes in der realen Welt und gibt deren Wert in Form der Helligkeit eines Pixels aus. Dieser Prozess kann als Photometric Kamera Model (Engel, Usenko, & Cremers, 2016) beschrieben werden. Durch die Kalibrierung des Photometric Kamera Models kann der Unterschied der Helligkeit von einem Punkt in der realen Welt minimiert werden (Bergmann, Wang, & Cremers, 2018). Dadurch kann die Ähnlichkeit mit solcher Helligkeit direkt verglichen werden.
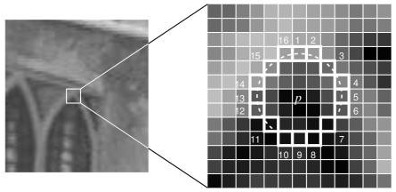
Ein bekanntes Beispiel dieser Methode ist DSO (Engel, Koltun, & Cremers, 2018). „Direct Sparce Odometry“ nutzt die Minimierung des Photometric Error zur Lokalisierung und minimiert die Photometric Error mit der Berechnung einer gewichteten, quadrierten Differenz zwischen acht Pixeln, die in der Umgebung der auf Ähnlichkeit untersuchten Pixel verteilt sind (Abbildung 4).
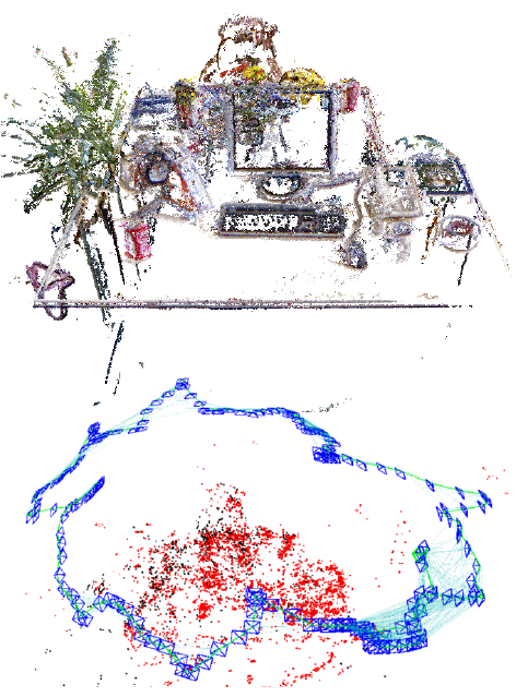
Auch DSO wurde für unser Porjekt efeuCampus genau untersucht, da es ebenfalls als Open-Source Projekt vorliegt. Es stellt sich heraus, dass DSO selbst unter schwierigen Bedingungen sinnvolle Ergebnisse liefern kann. Insbesondere für die Posenschätzung von direkt nachfolgenden Bildern funktioniert DSO auch stabil in einer sehr großen Umgebung im Außenbereich (Abbildung 5).
Jedoch ist die Lokalisierung aus einer anderen Perspektive erheblich schwerer als mit der ORB SLAM 2 Methode, da die Karte nur spärliche 3D Punkte und keine invarianten Features gegen Skalierung, Rotation und Blickwinkel enthält. Deswegen haben die Autoren einer wissenschaftlichen Arbeit zu diesem Thema (Gao, Wang, Demmel, & Cremers, 2018)noch zusätzlich ORB Features in der Karte verwendet, um die Lokalisierung aus verschiedenen Perspektiven zu ermöglichen.


Dichte 3D- Punkte
Die Landmarken, die nur aus spärlichen 3D- Punkten ohne invariante Features bestehen, können in der nachfolgenden Sensormessung nicht leicht wiedergefunden und eindeutig identifiziert werden, da zu viele Information über das Objekt verloren gehen. Im Vergleich dazu, ist eine detaillierte, dichte 3D- Punkte- Karte viel genauer, informationsreicher und aussagekräftiger.
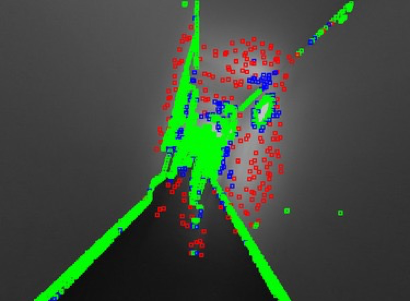
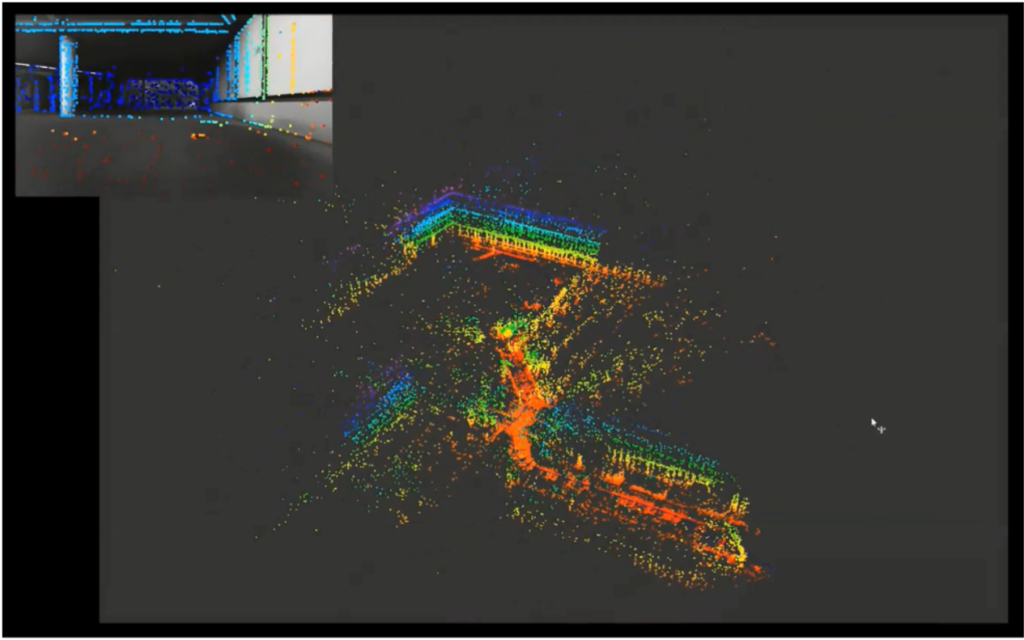
Für das Erstellen einer dichten 3D- Punkt Karte, wird in der Regel eine 3D- Punktwolke einer Sensormessung benötigt. Wegen des zu hohen Rausch-Niveaus und Aufwands, ist eine Kamera für die Generierung von dichten 3D- Punktwolken nicht besonders geeignet. Stattdessen wird ein 2D-/3D- Laserscanner für solche Aufgaben eingesetzt. Ein 2D- Laserscanner erfasst die Kontur von der Umgebung auf einer bestimmten Ebene, ein 3D- Laserscanner erfasst die Umgebung in 3D und liefert eine dreidimensionale Punktwolke direkt als Ergebnis. Aus 3D- Punktwolken kann der Pfad des Transportfahrzeugs Pose für Pose geschätzt und eine dichte 3D Karte Schritt für Schritt aufgebaut werden (Abbildung 6).
Die Konzeptbewertung
Bei der Bewertung der Kartierungsverfahren sind die wichtigsten Kriterien die Anforderungen an Sensoren bei Kartierung bzw. Lokalisierung und die Vorteile bzw. Nachteile für die Lokalisierung.
| Karte | Sensoren bei Kartierung | Sensorenbei Lokalisierung | Vorteile bzgl. Lokalisierung | Nachteile bzgl. Lokalisierung |
| Image Punkte Feature | Nur Kameras | Nur Kameras | – Nur Kamera notwendig- Gute Genauigkeit in einen kleinen, geschlossen Raum | – Schlechte Genauigkeit und Robustheit in großer Umgebung in Außenbereich |
| Image Linien Feature | Nur Kameras | Nur Kameras | – Nur Kamera notwendig- Gute Genauigkeit in linienstrukturreicher Umgebung, wie z.B. Autostraße. | – Genauigkeit und Robustheit in linienstrukturarmer Umgebung stark reduziert |
| Spärliche 3D- Punkten | Nur Kameras | Laserscanneroder Kameras | – Nur Kamera notwendig- Robust Feature Extrahierung auch in großer Umgebung in Außenbereich | – Feature Erkennung für die Re-Lokalisierung sehr schwierig. |
| Dichte 3D- Punkte | Laserscanner | Laserscanneroder Kameras | – Sehr gute Genauigkeit und Robustheit mit 3D- Laserscanner.- Gute Genauigkeit und Robustheit mit Laserscanner plus Stereo-Kamera. | – 3D- oder 2D- Laserscanner notwendig |