Lokalisierungskonzept
Nach der Bewertung der drei Lokalisierungskonzepte kann man sehen, dass es keine Methode gibt, die alle Kriterien erfüllen kann. Hinsichtlich der Verfügbarkeit ist der GNSS- basierte Ansatz am besten. Aber die Genauigkeit ist nicht zufriedenstellend, und die Kontinuität, vor allem unter Abdeckung oder in Straßenschluchten, ist stark eingeschränkt. Dagegen sind die Kontinuität und Genauigkeit des Ansatzes basierend auf Karten sehr gut. Aber wegen der Anfälligkeit der Sensoren, ist die Verfügbarkeit durch Witterungsbedingungen stark eingeschränkt. Daher stellen wir für das Projekt efeuCampusein hybrides Lokalisierungssystem vor, das beide Konzepte kombiniert.
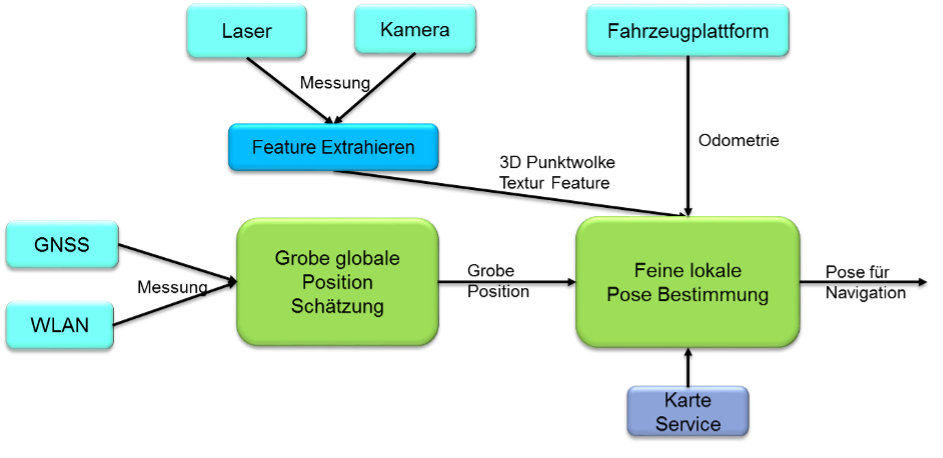
Das Lokalisierungssystem besteht aus zwei Teilen: der groben globale Positionsschätzung und der feinen lokalen Posen- Bestimmung. Der erste Teil benutzt hauptsächlich die GNSS Signale, um eine grobe globale Position zu bestimmen. Falls eine kontinuierliche Internetverbindung vorhanden ist, wird die Position noch mit dem RTK Verfahren verbessert. Falls eine bestimmte Mindestdichte von WLAN Access Points vorhanden ist, wird die Positionsschätzung noch mit WLAN basierten Methode ergänzt.
Der zweite Teil benutzt die vom ersten Teil erstellte, grob geschätzte Position als Input und sucht die a, besten passende Pose anhand der aktuellen Sensormessung in einem kleinen Radius. Dabei kann auch die Anforderung an Echtzeitfähigkeit eingehalten werden.
Die Suche erfolgt hauptsächlich über den Abgleich der 3D- Punktwolke mit einer geometrischen 3D- Karte. Die Karte wird mit in Konzeptionierung der Kartierung dargestellten Verfahren offline aufgebaut und bereitgestellt. Die 3D- Punktwolke soll idealerweise von einem 3D- Laserscanner geliefert werden. Wegen des Bauraums kann jedoch ein 3D- Laserscanner nicht in das efeuCampus- Fahrzeug eingebaut werden. Daher wird die 3D- Punktwolke von einem 2D- Laserscanner und Kameras extrahiert.
Die aus Kameras extrahierte 3D- Punktwolken sind normalerweise spärlich und ungenau. Das kann zu einer fehlerhaften Lokalisierung führen. Für den Fall, dass die Genauigkeit oder die Robustheit den Anforderungen nicht gerecht werden können, soll der auf Bildfeature- basierte Ansatz als zusätzliche Unterstützung eingesetzt werden.
Karten- Aktualisierung und- Verwaltung
Die auf Karten basierten Lokalisierungen können zwar Genauigkeiten im cm-Bereich erreichen, fordern aber auch eine relative statische Umgebung. In einem hochdynamischen Umfeld genau und robust zu lokalisieren, stellt immer noch eine große Herausforderung dar. Wissenschaftler haben in einer Arbeit dazu (Tipaldi, Meyer-Delius und Burgard 2013)gezeigt, dass die Kartierung nicht erfolgreich durchgeführt werden kann, selbst wenn der SLAM-Algorithmus und die Loop-Closure-Methode zusammen angewendet wird. Dabei wurden die dynamischen Faktoren nicht berücksichtigt.
Aus dieser Perspektive haben die Autoren einer weiteren Arbeit (Sun, Geißer und Nebel 2016) die dynamischen Faktoren als dynamisches Sensor- und Karten-Modell formuliert und in den Lokalisierungsprozess integriert. Damit ist eine robuste Lokalisierung auch in einer hoch dynamischen Umgebung möglich.
Die Kernaufgabe dabei ist die präzise Aktualisierung der Karte. Die Aktualisierung von einer 2D- Karte kann direkt im Lokalisierungsprozess integriert werden. Aufgrund der hohen Datendichte der Karte sowie des Sensors, ist eine online Aktualisierung jedoch sehr rechenaufwendig und schwierig. Dabei können die Sensormessungen von allen Fahrzeugen zuerst an einer Stelle gesammelt werden, um dann die Karte mit einem globalen Optimierungsalgorithmus zu aktualisieren (Kleiner, Dornhege und Sun 2007). Danach kann die aktuelle Version der Karte wieder auf alle Fahrzeuge verteilt werden.
Trotz der Aktualisierung der Karte kann es immer passieren, dass die Lokalisierung in zu dynamischen Umfeldern nicht in der Lage ist, die Anforderungen an die Genauigkeit einzuhalten. In diesem Fall besteht die Möglichkeit, die Lokalisierung im kritischen Bereich mit externen Systemen, z.B. externen Multi-Kamerasystemen oder künstlichen Landmarken zu unterstützen.