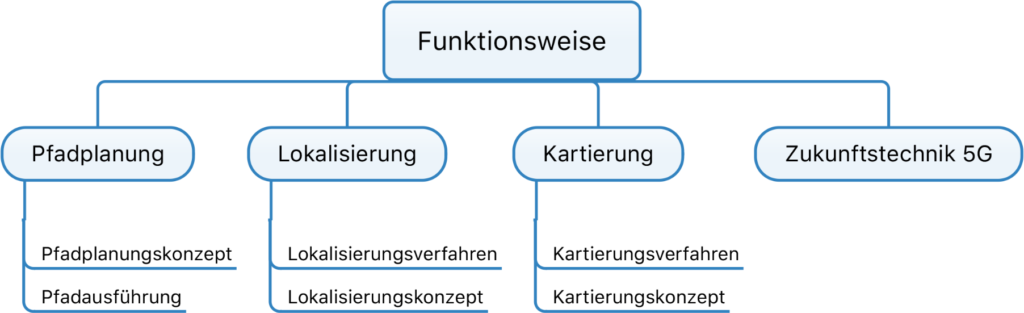
Funktionsweise
Wie funktioniert das efeuLog- System?
Wie findet sich das Transportfahrzeug auf der Straße zurecht?
Woher weiß das Fahrzeug, dass es anhalten muss?
Wie erkennt das Fahrzeug ein Hindernis? Und wie gehts es damit um?
Die Antwort auf diese Fragen rund um die Funktionsweise der einzelnen Komponenten und Teilbereiche des efeuCampus- Projekts sollen auf den folgenden Seiten beantwortet werden. Einen großen Teil zur Art und Weise der Funktion trägt die innovative Art der Navigation und Fahrzeugsteuerung bei, an der im efeuCampus stetig gearbeitet wird. Auf den zugehörigen Unterseiten finden Sie alle internen Informationen zur Funktionsweise der Transportfahrzeuge und des efeuLogs.
Smarte Navigation
Um sich im efeuQuartier zurechtzufinden, ist der Lieferroboter mit einer ganzen Reihe von feinfühligen Sensoren ausgestattet. So nimmt das Fahrzeug sein Umfeld wahr.
Auf Basis der aufgenommenen Informationen trifft der Roboter blitzschnell Entscheidungen und kann sofort auf unerwartete Ereignisse reagieren, etwa ein spielendes Kind oder ein plötzlich auftauchendes Hindernis.

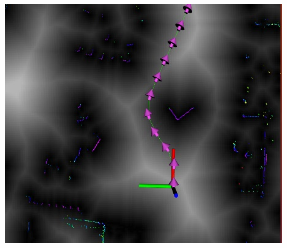
Dank seiner Sensoren lokalisiert sich der Roboter selbst und kartiert stets seine Umgebung. So folgt er stets der optimalen Route zum Ziel, die er mithilfe der globalen Karte des Stadtgebiets berechnet. Kommt ihm jedoch ein Hindernis in den Weg, kann er dank Motion Planning sofort eine neue optimale Route berechnen, die in diesem Moment die sicherere und bessere ist.